#include <View.hpp>
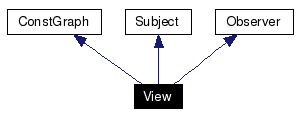
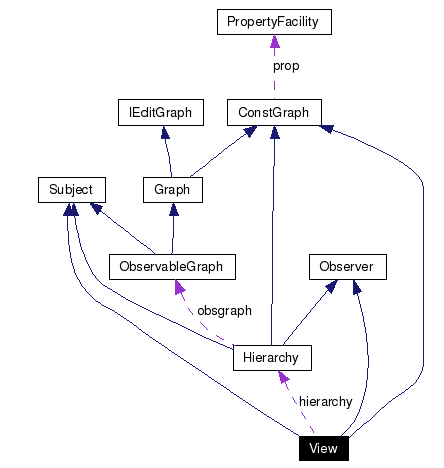
Inheritance diagram for View:
The view is a cross section through the hierarchy. This means, that there cannot be a node and one of its ancestors or descendants in the view at the same time.
There is no pre-computed data improving the speed of expand or collapse operations. For this project, the ad hoc generation of the edges was considered to be superior as the most general approach. Methods improving expand or collapse speed often have drawbacks when it comes to the ability to alter the hierarchy or base graph, which was not desired for a first implementation. Later specialized view implementation can be implemented realizing these methods.
Currently, maps are used instead of hash maps for the mapping of hierarchy nodes to view nodes and vice versa. The reasoning behind this is that in a view, there are probably not so many nodes because of viewing limitations, thus the overhead of a hash_map will make access slower in most cases.
Public Member Functions | |
| View () | |
| Empty constructor. | |
| View (Hierarchy *h, int init_mode=INIT_TOP, PropertyFacility *p=NULL) | |
| Constructor. | |
| View (const View &v) | |
| Copy Constructor. | |
| virtual | ~View () |
| Cleanup. | |
| virtual void | node_id (Node n, NodeID id) |
| Set the ID of a node and invoke an update message. | |
| virtual void | edge_id (Edge e, EdgeID id) |
| Set the ID of an edge and invoke an update message. | |
| void | update (Subject *sub, long msg, Item item) |
| Base graph / hierarchy update. | |
| void | expand (Node node) |
| Expand a node. | |
| void | collapse (Node node) |
| Collapse a node. | |
| Node | hierarchy_node (const Node node) const |
| Returns the hierarchy node corresponding to the given view node. | |
| Node | view_node (const Node node) const |
| Returns the view node corresponding to the given hierarchy node. | |
| Hierarchy * | get_hierarchy () const |
| Returns the underlying hierarchy. | |
| void | set_hierarchy (Hierarchy *h, int init_mode=INIT_TOP) |
| Set the underlying hierarchy. | |
Static Public Attributes | |
| static const int | INIT_TOP = 1 |
| Used to init view to top view. | |
| static const int | INIT_BOTTOM = 2 |
| Used to init view to bottom (completely expanded). | |
Private Member Functions | |
| void | init (Hierarchy *h, PropertyFacility *p, int init_mode) |
| Initialize View to "top view". | |
| void | get_graph_childs (Node parent, std::vector< Node > *nlist, bool do_ignore_node, Node ignore_node, bool do_ignore_edge, Edge ignore_edge) |
| Do a BFS down the hierarchy to get the bottom nodes of a parent. | |
| void | add_node_edges (Node node, bool do_ignore_node, Node ignore_node, bool do_ignore_edge, Edge ignore_edge) |
| Determine and add all edges of a view node, ignoring the given hierarchy node and edge if do_ignore_(node|edge) is set (thus can be used before they are actually deleted). | |
| void | new_node_update (Subject *sub, Node node) |
| Base graph / hierarchy new node update. | |
| void | del_node_update (Subject *sub, Node node) |
| Base graph / hierarchy del node update. | |
| void | new_edge_update (Subject *sub, Edge edge) |
| Base graph / hierarchy new edge update. | |
| void | del_edge_update (Subject *sub, Edge edge) |
| Base graph / hierarchy del edge update. | |
Private Attributes | |
| std::map< Node, Node > * | hierarchynodes |
| Maps view nodes to hierarchy nodes. | |
| std::map< Node, Node > * | viewnodes |
| Maps hierarchy nodes to view nodes. | |
| Hierarchy * | hierarchy |
| The underlying graph. | |
| bool | own_hierarchy |
| Documenting if the hierarchy was created (and should be deleted) by the View. | |
|
|
Empty constructor. This will create e new Hierarchy as a base of this view, which will be deleted automatically when the view is deleted. |
|
||||||||||||||||
|
Constructor.
|
|
|
Copy Constructor. This never creates an own hierarchy. It will always be a view on the hierarchy of the cloned view.
|
|
|
Cleanup.
|
|
||||||||||||||||||||||||
|
Determine and add all edges of a view node, ignoring the given hierarchy node and edge if do_ignore_(node|edge) is set (thus can be used before they are actually deleted). This is done as follows:
Summarized complexity: O( #hierarchy_nodes + #base_graph_edges * log(#base_graph_nodes) + #base_graph_nodes * hierarchy_height * log(#view_nodes) ) Note that the log factors results from the use of std::map.
|
|
|
Collapse a node. This will first look for the parent node of the given node. Then, all the children of the parent node are taken out of the view, and the parent node is put into the view. Complexity (without recursion of step 1): O( #view_edges * log(#view_nodes) + #view_nodes * log(#view_nodes) ) If we only look at the changes in the view which have to be done (which cannot be omitted), we can constrain the complexity further. Let #dve be the number of edges which we have delete in the view, and #dne the number of nodes that have to be deleted. Then the complexity can be summarized as follows: Complexity (without recursion of step 1): O( #dve * lov(#view_nodes) + #dne * log(#dne) ) (The log factors in these complexities result from the use of std::set)
1) To be able to collapse a node, all children of it's parent have to be in the view. Thus, the first step is to recursively collapse all children which are currently not in the view. 2) For each child of the parent of the node to collapse, all incoming and outgoing edges are considered and all adjacent nodes are inserted into an incoming-edges-set and an outgoing-edges-set. 3) The children are deleted and the new edges are created using the two previously created sets. |
|
||||||||||||
|
Base graph / hierarchy del edge update. If an edge in the hierarchy is deleted, and an ancestor of the edge's source is in view, it's edges have to be recalculated, and the target of the hierarchy's deleted edge has to be added to the view. Complexity: O( hierarchy_height * log(#view_nodes) + #view_edges + O(View::add_node_edges()) ) If an edge of the base graph is deleted, which might be the reason that an edge between two view nodes exist, a check has to be done if there is another base graph edge that induces the edge in the view. Complexity: O( hierarchy_height * log(#view_nodes) + O(View::get_graph_childs()) + (#graph_nodes + #graph_edges) * log(#graph_nodes) )
|
|
||||||||||||
|
Base graph / hierarchy del node update. If a hierarchy node was deleted, and the node was in the view, it is expanded. If it can't be expanded, it is deleted. (Complexity: See expand() operation). If a hierarchy node was deleted which was not in the view, but an ancestor of it was, then the edges of the ancestor in the view have to be deleted and recalculated (add_node_edges()). Also, as the childs of the deleted node are now without parent, they have to be added to the view. Complexity: O( hierarchy_height * log(#view_nodes) + #view_edges + O(add_node_edges()) + log(#view_nodes) * #children(node) ) Updates from the base graph are not used, because an update from the Hierarchy will follow.
|
|
||||||||||||
|
Set the ID of an edge and invoke an update message. See ConstGraph::edge_id(e, id)
Reimplemented from ConstGraph. |
|
|
Expand a node. This will take the given node out of the view and put all it's children (in the hierarchy) into the view. Complexity: O( #base_graph_edges * log(#base_graph_nodes) + #base_graph_nodes * hierarchy_height * log(#view_nodes) )
// PSEUDOCODE foreach outgoing edge e of old view node in the hierarchy view->add( e->target() ) endforeach delete(old view node) foreach new view node n // Find all nodes in the graph for which n is an ancestor by going down // in the hierarchy // Worst case complexity: O( #base_graph_nodes ) graphnodes = hierarchy->bfs_downwards( n ) // Find all adjacent base graph nodes to all those descendants and store // them in a map // Worst case complexity: O( #base_graph_edges * log(#base_graph_nodes) ) new_leaves = graph->get_adjacent_nodes( graphnodes ) // Of the base graph nodes found in the previous step, find all ancestors // which are in the view // Worst case complexity: O( #base_graph_nodes * hierarchy_height * log(#view_nodes) ) adjacent_nodes = hierarchy->find_predecessors_in_view( new_leaves ) // Create edges for all found adjacent nodes // Worst case complexity: O( #view_nodes ) view->create_edges( n, adjacent_nodes ) endforeach |
|
||||||||||||||||||||||||||||
|
Do a BFS down the hierarchy to get the bottom nodes of a parent. Worst case complexity (Hierarchy::graph_node() is assumed to be constant time): O( #hierarchy_nodes )
|
|
|
Returns the underlying hierarchy.
|
|
|
Returns the hierarchy node corresponding to the given view node. Complexity (std::map): O( log(#view_nodes) )
|
|
||||||||||||||||
|
Initialize View to "top view". Currently, two initialization modes are supported:
|
|
||||||||||||
|
Base graph / hierarchy new edge update. If a new edge was added to the hierarchy, and some predecessor of the new edge's source is in the view, and some ancestor(s) of the target of the new edge (or the target itself) are in the view too, the view-neighborhood of the target's ancestor(s) has to be moved to the predecessor in the view and the target's ancestor(s) have to be removed from the view. Complexity: O( #hierarchy_nodes * log(#view_nodes) + hierarchy_height * #view_edges * log(#view_nodes) ) If a new edge was added to the base graph, a check is done if there is already an edge between the ancestor nodes in the view. If not, it is added. Complexity: O( hierarchy_height + #view_edges )
|
|
||||||||||||
|
Base graph / hierarchy new node update. If a new node was added to the hierarchy, a new node is inserted in the view via priv_new_node, and viewnodes and hierarchynodes maps are updated. Complexity: O( O(ConstGraph::priv_new_node) + log(#view_nodes) ) If a new node was added to the graph, nothing is done, because it will be added to the hierarchy and we will get the update from there.
|
|
||||||||||||
|
Set the ID of a node and invoke an update message. See ConstGraph::node_id(n, id)
Reimplemented from ConstGraph. |
|
||||||||||||
|
Set the underlying hierarchy. This sets the Hierarchy on which the View is built. Before it does this, it unregisteres itself as an observer from the previous underlying Hierarchy (which is deleted if it was created by the View), and deletes all it's nodes and edges. A fresh View is then built on the new underlying Hierarchy.
|
|
||||||||||||||||
|
Base graph / hierarchy update.
Implements Observer. |
|
|
Returns the view node corresponding to the given hierarchy node. Complexity (std::map): O( log(#view_nodes) )
|
|
|
The underlying graph.
|
|
|
Maps view nodes to hierarchy nodes.
|
|
|
Used to init view to bottom (completely expanded).
|
|
|
Used to init view to top view.
|
|
|
Documenting if the hierarchy was created (and should be deleted) by the View.
|
|
|
Maps hierarchy nodes to view nodes.
|
 1.4.1
1.4.1